第13回・ロボラボ(1)
* 準備 *
 |
午後からの授業に備え、早くきた生徒と一緒に、 ロボット走らせるコースを作りました。 |
* ロボラボ・マシンの組立 *
今日の午後から短期集中講座が始まりました。 最初は、1日半をかけてロボラボによる実習です。2人1組のチームを組み、機材を配布し、セッティングしているところです。真新しいロボラボを袋からだして、確認をしています。 マシンは2人で1台ですが、プログラムは個々で作成できるよう、転送用の赤外線トランスミッターとケーブルは人数分用意しました。 |
 |
 |
説明ビデオ(英語)を見ながら、CRX(本体)の使い方やポートの意味、 接続の仕方などを確認していきました。 |
| パイロットレベ゙ルで、プログラミングの初歩と転送の仕方、検証の仕方を学びます。変更したプログラムをその場で転送して確認できるので、生徒たちは楽しそうに取り組んでいました。左右のモーターを使って前進し、タッチセンサーが押されたところで止まる、一定時間まっすぐ後退するというプログラムができたところで今日の授業は終了です。 |  |

第14回・ロボラボ(2)
* ロボラボ・パイロットレベル *
今日は朝から1日取り組みました。まずは、パイロットレベルでウォーミングアップです。レベル3では、2ステップあるプログラムを、レベル4では、「前進、タッチセンサーが押されたら4秒後退、3秒前進して止まる」というステップが3つ必要なプログラムを作成しました。
* ロボラボ・インベンターレベル *
|
そしていよいよインベンターレベルです。ツールパレット、ダイヤグラムの使い方が、最初はむずかしのですが、徐々に要領がわかってきます。ワイヤーの張り方、パラメーターの設定の仕方などもコツをつかんでいきます。
|
午前中最後の課題は、「2秒前進、90度左折して1秒前進を3回繰り返す、更に左折し1秒後退する」というものです。プログラムの考え方がわかると、後はマシンとの微調整です。90度というこだわりがむずかしいところです。左右のモーターの回転、出力パワー、時間などを調整していきます。床面との摩擦とのかねあいもでてきます。それでもほとんどのチームがクリアーすることができました。
|
|

* ロボラボ・ライントレース *
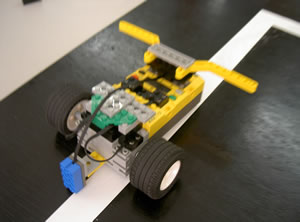
午後からは、最終課題のライントレースに取り組みます。白黒の差をセンサーで判別するための境界値を測定し、それによって条件分岐をさせていきます。練習として、「黒で前進、白で後退」というプログラムを作成してもらいました。 そして、ライントレースするには、どういう考え方でプログラムを作ればいいのかというヒントだけを与え、プログラミングに取り組んでもらいました。 このキャタピラー型のマシンは、あっという間にプログラムを完成させ、最初にライントレースに成功しました。キャタピラー型は動きが比較的ゆっくりなので、いいのかもしれません。 |
 |
 |
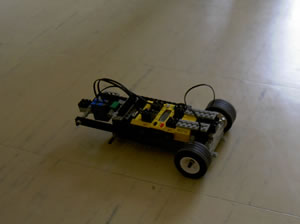
プログラムを作成し、転送して検証、うまくいかないとその原因を考えてまた改良の繰り返しです。検証する中で、マシンが壊れたり、またマシンの方を改良したり、試行錯誤の連続です。皆、休憩もとらずに一生懸命取り組んでいました。 最後に各チームのマシンをデモンストレーションしてもらいました。このマシンは、最も速いスピードで、しかも音楽を奏でながら1周しました。前輪駆動が特徴のマシンです。 |
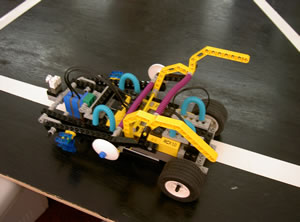
このマシンは、かっこよく完成していますが、かっこよさを追求したために動きが今ひとつでしたが、最後にはきれいに1周トレースできました。ぱちぱち。 1日半をかけてのロボラボ実習、ごくろうさまでした。
|
|
* 生徒の感想 *
ロボラボ実習を終えての生徒の感想です。
- 最初は、マシンを作るのが大変だった。前進だけでも難しかったのに、最終的には音楽を流しながらライントレースできたから、
すごいと思ったし、楽しかった。
- ライントレーサのセンサーがうまく感じていなくて大変だった。
- 最初は、線の上を走らせるなんて簡単だと思ったけれど、プログラムを作るのは意外に大変だった。きちんと線の上を走った時は感動した。
- 最初は難しく理解できなかったけれど、少しパソコンをいじっていたら何とか理解できるようになった。
実際ロボットをカーブさせるのがとても難しかった。時間がもう少しあればできたかも。この単純なプログラムでも大変なのだからアイボは
比較にならないほどのプログラムの量だと思う。
- できることならもう少し時間がほしかった。
- あと3時間くらいあったら、もっと良い結果が残せたのにと思う、授業としては楽しくて良かった。
- ライントレーサのプログラムがむずかしかった、でも、もっとむずかしいプログラムにも挑戦してみたいと思った。
- 最初の説明ビデオが英語なのでむずかしかった。もっと時間がほしかった。
- 最初のうちはかなり順調にいっていたのですが、最後のライントレースでつまづいてしまって残念でした。
できあがりの形はかっこよく気に入っています。今回の実習を終えて、ロボットを作る時の楽しさや、
自分の思い通りに動いた時の喜びなどを知ることができたと思います。朝からの実習で、疲れましたが、それなりに
楽しい思い出ができたので良かったです。
- ライントレース以外は順調にできたけれど、最後のライントレースではプログラムがなかなかうまくできず、苦戦しました。
でも本番では、なんとか一周することができてとても良かったです。
ロボラボの授業を受ける前は、難しくて自分にはできないと思ったけれど、やってみると意外にわかりやすく、
やってみてとても楽しかったです。
- 自分で自分のやっていることがよくわからなかった。でも最後にはなんとか動いたので良かった。
みんなみたいにマシンをデコレーションできなかったのが残念です。
 戻る
戻る