第6回・ロボラボ(1)
* ロボラボ・マシンの組立 *

ロボラボを使っての実習に取り組みます。2人1組のチームを組み、
ロボラボセットを配ります。マシンは2人で1台ですが、プログラムは個々で作成できるよう、
転送用の赤外線トランスミッターとケーブルは人数分用意しました。
RCX(本体)、タッチセンサー、光センサー、ケーブル、モーターなど主要な部品を確認し、
マシンの組み立てに入ります。
* 通信テスト *
コンピュータからの転送テストをし、トランスミッターを通してマシンと通信できることを確認します。
* パイロットレベル *
プログラミングの最初は、パイロットレベルからです。レベル1は、右モーターを一定時間順回転させるというものです。プログラムを転送し、実行し、その確認をします。あっという間の2時間でした。

第7回・ロボラボ(2)
* パイロットレベル *

ロボラボの実習に必要なものをセッティングし、通信テストをそれぞれ行います。本体にプログラムを最大5つまで保存することができますが、マシンは2人で1台なので、相談して使いわけをするようにします。
前回の続きで、パイロットレベルの2〜4までを実習します。
タッチセンサーの使い方、プログラムの保存の仕方、ステップの増やし方などを学習します。
* インベンターレベル *
後半は、インベンターレベルに入りました。
こちらは、青信号(スタート)と赤信号(ゴール)の2つしかないところに、
命令を表すアイコンを並べ、ストリング(糸)でつなげていきます。
これらツールの使い方を説明し、まずは簡単なプログラムを組んでみました
特にストリングの扱い方がむずかしく、きちんと一直線に並んでいないと、プログラムとして
認識してもらえず、したがってマシンに転送できません。
本日最後の演習問題は、「タッチセンサーが押されたら前進、再びタッチセンサーが押されたら止まる」
というものです。各自プログラムを作成し、マシンに転送し、動きを検証します。
第8回・ロボラボ(3)
* インベンターレベル *
中間テストがあり、2週間の間が空いてしまっていましたので、
インベンターレベルのプログラミングの仕方から復習しました。
タッチセンサーをスイッチ代わりにして、前進したり止まったりという動きを確認しました。
その後は、同じことを繰り返すというプログラムを作りました。
2秒前進、2秒停止を繰り返すというものです。
* 自動走行プログラムに挑戦 *
次にような課題を設定しました。
2秒前進した後、90°左回転し1秒前進を3回繰り返す。次にもう1度90°左回転し、1秒後退する。90°回転をさせるにはどうしたらいいかというのが、最大の課題です。 各チームともアイディアを出し合い、90°回転を模索します。
最初に考えるのは、左右のモーターのパワーに差をつけるというものです。 多くの場合、これではうまくいかず、悩むことになります。 そうすると次に考えるのは、左のモーターを完全に停止させる、 それでもうまくいかないと、左のモーターを逆回転させるというものです。 そして、ちょうど90°というのを実現するのがなかなか大変で、微妙な時間とモーターのパワーで 制御していきます。それぞれマシンの形状が違いますから、自分たちのマシンに合わせて 微調整をしていきます。生徒たちは、90°というのにずいぶんこだわって何度も繰り返していました。
最後は発表会、各チームとも、自分たちのマシンで、自動走行を披露しました。 最後に左折が1回足りなかったというチームはありましたが、すべてのチームが ほぼ課題をクリアーすることができました。 見事な90°回転を披露してくれたチームもいくつかありました。
* 公開授業 *
情報部会の第1回研究会ということで、
今回の授業を見ていただきました。
第9回・ロボラボ(4)
* ライトセンサー *

ライトセンサーを用いてのライントレースに挑戦しました。
最初にライトセンサーを取り付けて、白黒判定をさせるのですが、
なぜかライトセンサーがうまく機能せずにかなり手こずりました。
原因はよくわかりませんが、やっているうちに反応をし出したりしましたが、
最後までだめだったマインもありました。
白が58くらい、黒が38くらいの数値を示しますので、
境界値としては、45くらいを用いました。
最初に取り組んだのは、黒で前進、白でストップというプログラムです。
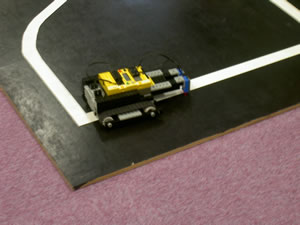
* ライントレース *
そしてライントレースに挑戦です。ライトセンサー(1個)で白黒判定し、境界線をトレースしていきます。半数くらいのグループは、自分たちで作ったプログラムでトレースに成功しました。
直角を見事に曲がるグループもありました。一方で、構造的にトレースするのがむずかしいマシンもありました、マシンの改良が必要ですね。そういうわけでもう1回、機会を設けることにしました。
第10回・講義「これからのロボットの役割と研究の面白さ」
* 大学の講義 *
| 
|

|
|
|
|

* 生徒の感想 *
- おもしろかった。いろいろなロボットの動きとかを見ることができて、ロボットには強く作るだけでなく、
人間のように柔軟性も持ち、いろいろなところで役に立つことがわかった。ロボットへの興味が増したと同時にロボットのむずかしさもわかった。だけれどそのむずかしさがあって、誰でもができるようなものではないからこそやりがいがあると思います。いろいろ知らなかったことができて、とても良かった講義だと思います。
- GBアドバンスでも動かせるということを初めて知り、感動した。
- 今回の授業はとても楽しかったです。大好きなロボットがなぜ動いているか、ゲームボーイで動かせるとか、
非常に楽しい授業でした。
「ロボット入門」でももっとこういうことをやってほしいです。今日はロボットのことが更に好きになりました。
- ロボットを作るのに、すごく多くの課程があって、それをすべてクリアしないと歩行もできないことがわかった。
だから、前回やったロボラボもすべての条件を完全にしないと進まないとわかった。きれいに動作をするためには、すごい計算をしなければならないこともわかった。
- ロボットについて知りたいことがたくさん知れて本当に良かった、制作に必要な技術やしくみをとてもわかりやすく学べてとてもおもしろい機会で良かった。ロボットを制御する内部部分のしくみについてモータ−の制御やマヴチモータを使った場合に、意外に身近にあるオーディオのボリュームセンサー等が使われているのを知って、ロボットだから難しい専門部品を使うだけではないことがわかって良かった。
- 普段聞くことができないことが聞けて良かったと思う。
- ロボットの起源など、初めて知ったが、この名前を作った人はとても頭のいい人なのだと思った。ロボットの構造には、驚きの連続だった。これも長い年月の努力の結晶なのだと思った。
- 色々なことを初めて聞いたが、正直2割ぐらいしか理解できなかった。いろいろな基礎知識が必要だと思った。それでも有意義な話だった。次はもっと知ってから聞いて見たい。
- ロボットについて知らなかったことがわかってとてもいい勉強になった。ロボットと機械はどう違うかなどがわかった。ロボットの性能についても初めて知ったこともあり、すごいなあと思った。
- ロボットの始まりやロボットと機械の違い、人のそばで働く条件など、普通に勉強していたのではわからないようなことがたくさんわかってとても良かった。また、ロボット関係に進むには、数学だけではなく、物理などいろいろな知識とその知識を応用する考えが大切なのがよくわかったけれど、大変そうだった。
- 後半の話は、むずかしくてよくわからなかったけれど、初めの方は、AIBOの話とかがおもしろかった。
ロボットの動き一つ作るのにかなり大変な作業をしていることがわかった。ロボットが実際に動くのが見られて良かった。
- とても興味深い話が聞けて良かった。
- コンピュータの回路の仕組みやロボットを歩かせるのに必要な電圧など、とても細かいところまで教えてもらった。
第11回・ロボラボ(5)

* ライトセンサー *
ライトセンサー1個で、白黒判定をしながらトレースするということが目標です。それをクリアできたグループは、センサー2個でのトレースプログラムに挑戦してもらいました。センサーが2つということで、それぞれが白黒判定しますが、その条件分岐をどう組み合わせたらいいのかという点でかなりの生徒が悩んでいました。
* ライントレース *
後半の時間は、発表会をしました。各グループがセンサー1つまたは2つを用いて、
ライントレースを披露していきました。ほとんどのマシンが直角を含めて見事に1周できました。音楽を流しながら走行するマシンもありました。
* 生徒の感想 *
- 面白かったけれど、全体的に時間が足りなかった印象が大きい。
通年の科目にして、ロボラボの時間も倍くらいにしてほしい。
後、もっと進歩した内容(二足歩行とか)をやってみたい。
- 初めはプログラミングとか全然わからなかったけれど、ロボラボをやっているうちに結構プログラミングも出来るようになれて良かった。そして、自分のプログラムで言われた通りに動いたときはとてもうれしかったし達成感があった。
- ロボラボを終えてみて、実際にやってみるととても難しくて簡単に作れるようなものではないと思った。これだけ難しいのだから、増してやロボワンや、その他発表されているロボットは本当にすごいと思った。
私はロボットを作る仕事に就けたらいいなあと思っていたが、こんなに難しいのでは、考え直す必要があるかもしれない。
- 最初はプログラミングも全くわからなかったけれど、やっているうちにわかるようになって、いろいろと勉強になった。
- 途中でこわれちゃったりしたけれど、最後はレースのコースをきれいに一周することができて本当に良かった。今回も一人だったけれど、がんばって発表することができて良かった。
- 毎回楽しくでき、ロボラボのプログラムを作ったりしてとてもよくわかった。
- ロボラボの実習を終えて、ロボラボのプログラミングは、ロボットのプログラミングを簡単にまとめた教育と基礎の勉強にとても効率が良いと思った。C言語を使った本格的なロボットプログラミングにその知識や経験を生かしたいと思った。しかし、こんなのおもちゃだと最初は甘く見ていたが、予想を上回る難易度の高さで驚いた。とても有意義なもので、いい機会であったと思う。
- プログラムのことがよくわかり、とても楽しい授業でした。特にライントレースのところで最も苦労しましたが、成功したときは一番うれしかったです。
- ロボラボはレゴを使っているので、簡単なことですむと思っていたが、モーターと組み合わせたり、動く向きを変えたりと結構難しかった。だけど、本当に動く向きが変わったときは、心の底からうれしくなりました。こんな感動がもっとほしいです。
- ロボラボは準備が大変で、赤外線があまりうまくいかなかったり、エラーが起きてとても大変だったけれど、自分でプログラムを作ったり、考えたりするのがとても楽しかった。発表では、自分のがうまく行かなくて、他の人のがうまくいったのが残念でした。考えすぎて頭が疲れたけれど、ロボラボができて良かったです。
- プログラミング等をやってきたが、後半の方は意味がわからなくなった。少し自分には難しかったようだ。
- 家にパソコンがないので、まったくと言っていいほどちんぷんかんぷんでした。でも、やっているうちに慣れてきたので、最後は自分で作ることができてとても良かったです。また、機会があればやりたいと思います。
 戻る
戻る
 次へ
次へ