第12回・AIBOによる実習

* AIBOを制御する *
AIBOを2台、さらにそれを制御するためのソフトウエア「AIBOマスタースタジオ」を購入してもらうことができましたので、これを用いたプログラミング実習を行いました。
PC上で作ったプログラムをメモリースティックに保存し、それをAIBOのお腹に入れて再起動をかけます
と、そのプログラムが実行されます。
コンピュータ教室のPCでは、メモリースティックの読み書きはできませんので、
ノートパソコンにリーダー/ライターを接続しました。(2セット)
生徒はPCで作成したプログラムを一端、FDに保存し、それをこのノートパソコンで開き直してから
メモリースティックに保存をします。ここがわずらわしいところですが、AIBOは2台しかありませんので、
まあ仕方がないかなというところです。
メモリースティックも専用のものしか使えないということで、数枚購入しました。

* クイックビヘイビアアレンジャー *
これには、「順次実行タイプ」と「イベント実行タイプ」があります。 前者は、「立つ、歩く、座る」というように指示した順番にプログラムが実行されていきます。 後者は、頭を下げると歩く、「アイボ」と声をかけると立ち上がるというように、 刺激に反応するようなものです。 どちらも、命令を選択していくことで、簡単にプログラミングができるものです。
* 条件分岐のあるプログラム *
「ビヘイビアアレンジャー」を用いたプログラミングに時間をかけました。
(「AIBOマスタースタジオ」のチュートリアルにある題材を参考にさせていただきました。)
新規作成をすると、「スタート」と「エンド」がでてきて、その間に、
命令を指示するアクションボックス、条件分岐をするためのブランチボックスなどを配置し、
その内容を細かく指示していきます。そしてそれらを線でつないでできあがりです。
最初に実習したのは、「立ち上がったら、10cm歩いておじぎをする」というものです。
出来上がったらAIBOで試してみるわけですが、確かにプログラミングされた通りにAIBOが動くと、
うーん、納得という感じでしょうか。
次はブランチボックスを使って、「まず立ち上がり、頭を押されたら歩いておじぎをする」というものを作りました。ブランチボックスの中で「if else」を用いた条件分岐を記述していきます。また、センサー(この場合は頭)で情報を受け取ることから、センサーを初期化するという手続きについても学びました。
この後は、予め用意されている動作「キックする」「旋回する」「伏せる」などを組み合わせて自由にプログラムをしてもらい、AIBOで実行してみました。頭を左右にふるためのパラメーター、プラスの数値が右なのか左なのか、マニュアルを見なくてもやってみればわかります。(プラスは左でした。)
* サブプログラム *
次に取り組んだのは、音声認識を用いて、条件による3分岐です。「立ち上がる、かけられた声によって違うアクションをする。『AIBO』と言われたら前進しておじぎ、『こんにちは』と言われたら
挨拶をする、それ以外のことばの場合は怒る」というものです。
プログラムが複雑になってきた場合、その構造をすっきりさせるため、一部をサブプログラムとして独立させるとよい、更に独立させることで別な場面でも再利用ができるようになる、ということで、このソフトウエアでは「グループ」と呼ばれますがそれを作成しました。かけられた音声を識別するという部分を独立させたわけです。更に条件による3分岐ですから、ブランチボックスを用いた分岐を2重に用いることになります。
また、「AIBOマスタースタジオ」では、「アクションライブラリ」にアクション(AIBOの短い動き)
が予め用意されていて利用することができるのですが、その情報をメモリースティックに保存
して利用することから、メモリースティックが直接つながっていない今回の環境では、利用することができません。ですから「キックする」ことで怒った様子を表したりといった工夫をしていきます。
* 複数のプログラムを同時実行 *
「立ち上がって前進、障害物を関知したら後進する」というプログラムを作成してもらいました。
「障害物を関知する」という命令文を教えれば、後は今までのものを組み合わせて作ることができます。
次に、「前進しながら障害物を探す」、また後進するときも
「バックしながら首を振る」など複数の命令を同時に実行するプログラムを作成しました。
単に並列させるだけなら、「wait」というコマンドを入れずに命令を並べていけばいいのですが、
「前進しながら障害物を探す」のだけれど、「見つかった時点で後進する」という方は、条件分岐が入ってきますので、やや複雑です。条件分岐とループを組み合わせて作成していきます。
* サッカーするAIBO *
最後は、予め用意されているプログラムを解析しました。
今日、初めて体験していますから、1日でサッカープログラムを作成するところまでは、
厳しいということです。
もっとやってみたいという場合は、個人的に挑戦してみてもいいし、
3年次にある課題研究で、AIBOを使った研究をするということもあるかなということを話しました。
プログラムの方は、グループが3重になっていてかなり複雑です。
ピンクボールを探し、見つかったらそれを追跡、追いついたところでボールが停止しているのを確認
してキックする、そしてまたボールを探して追いかけるというものです。
* アクションの作成 *
生徒たちのPCからはアクションライブラリを使えないので、私の操作を
プロジェクターを通して、見るだけになってしまいましたが、
アクション(短い動き)がどのようにしてできているかというのを見てもらいました。
時系列に、AIBOのモーション(手足の動き)が
キーフレームのところで設定されていて、その間はスムーズな動きになるように補完されています。
またこれに合わせて音声出力や、LEDの点灯も設定できるようになっています。
もちろん編集も可能で、音を追加したり、LEDを点灯させてみたり、また頭の動きを変えてみたりしました。本当は、生徒がそれぞれ体験できると良かったのですが・・・。
来年に向けて、AIBO本体は高価なのでこれ以上は無理としても、
生徒一人1台のリーダー/ライターとメモリースティックが用意できれば
このアクションの編集などはできるのでしょうが・・・。

* 成長するAIBO *
既存のソフトウエアに「チャッティライフ」というものがあります。
これは、AIBOを成長させていくものです。これも購入しました。
夏休みに入って、私が育て始め(?)、少年期を迎えたAIBOと遊びました。
電源を入れると、のびをして起きあがります。名前を呼ぶと答えたり、
かまってやると喜んだりします。ピンクボールが大好きで、放っておくと1人(匹?)で
ボールを追いかけて遊んでいます。
「写真撮って」というと、写真を撮ってくれます。
これは、AIBOが撮ってくれた写真です。
* NHKプロジェクトX「復活の日 ロボット犬にかける」を見て *
AIBOの開発の話がNHKのプロジェクトXで取り上げられています。そのDVDを鑑賞しました。生徒たちの感想を紹介します。
- 「人の真似をするな。新しいことをやれ。」ということばが印象的でした。 加藤さんみたいに、ロボットに関する知識がなくても新しい発想がでてくるのはすごいと思った。
- AIBOはただ犬をまねしただけではなく、いろいろな面から設計されている。 また、新しいことを始めることはかなりの覚悟がいると思った。
- AIBOをさわってみて思ったことは、プログラムがすごく難しいと思った。 なぜならプログラムが矛盾していると、思ったいる動作をしてくれないところが難しいと思う。 今日のビデオを見て思ったことは、こういう細かいプログラムを作っていくと、ひとつでも間違っていると 動かないので、すごく苦労なことだと思った。ソニーの社長はすごくいいことを言っていると思う。 「人のまねをするな。自分で新しいことをやれ」と言っていて、このことばが人類の発展につながっているのだと思った。
- 全てのロボット開発者の夢、それが「アトム」。この「AIBO」は、 その夢を実現させるための第一歩になった訳です。 やはり夢がないと何もできない。夢があったおかげで「AIBO」が生まれた、 改めて夢というものがどんなにすごいことか、実感したと思います。 夢の力に不可能はなく、夢は無限大なんだと思いました。
- 「人のまねをするな。新しい物を作れ、それが物作りだ」という言葉がとてもいい言葉だと思った。 ロボットを作っている人たちは、たくさん文句や無理なことを言われて怒ったり妥協をした時があったけれど。 それを乗り越えて完成したときは本当に達成感やうれしさ、感動をしたと思う。 このビデオを見て、僕も本当に物作りのすごさやロボットができた時のうれしさなどが伝わってきた。 このビデオを見ていろいろと役に立ったと思った。
- 私たちの目の前でかわいらしく動いているAIBOは、ただ犬をまねただけでなく、 何人もの技術者がいろいろな面から設計していて、最終的に全部合わさってできたのがAIBOだった、 ということを知ってロボットとは技術者たちの夢の形だった。
- ロボット開発には、「技術」「アイディア」だけでなく、会社との契約による「金」や 作るための「チームワーク」も必要となる。それで自分の考えに加えて他人の考えも受け入れることと、中途半端に終わらないで最後まであきらめずにがんばって努力することが大事、そして なによりも自分から進み新しいことをすることが一番大切である。
- 人の真似ではなく新しい事をやるのは大変だと思うし、会社をやめた人を呼び戻すのも大変だったと思う。でも最後にはちゃんと3000体売ることができて、すごいなあと思った。
- 新しいことを始めようとする気持ちがすごいと思った。AIBO完成までにはとても大変だったとわかった。たくさんの技術者が集まって作り、すごいなあと思った。
- AIBOを作るために開発した人たちの努力がわかった。今、AIBOがあるということは、 開発者の知識やアイディアが実ったということで、すごいことだと思った。
- 社員11万人という大企業となったソニー。そして流行り出した大企業病。いつしか人任せとなった考え。そんな考えを振り払うかの様に作られる犬型ロボット。しかし、その中では大きな反対と反発があった。それは上からだけではなく、下からも。そんな中で作りあげたというのは、すごいことだと思う。内側だけでなく外側からも集められたスタッフ。そこにしかれた厳しい道。けれど、それを乗り越えられたのは、”もの”を作る意地なのかもしれない。

第13回・ロボットに関するレポート発表
* 夏休みの課題 *
夏休みに以下のような課題を出しました。
課題:ロボットに関するレポート提出
テーマ:以下の中から選ぶ
(1)ロボットに関する書物を読んで
(2)ロボットに関する映画を見て
(3)愛知地球博、日本科学未来館など、ロボットに関する展示を見て
パンフレットなど参考資料があれば添付すること
評価の観点:ロボットの歴史、ロボットと社会との関わりについて興味を持ち、調べたことや考えたことを表現できる。それらを通して、ロボットが社会に果たす役割や意義を理解する。

* ロボットに関するレポート発表 *
レポートを提出すると共に、それを発表してもらいました。
テーマについては、ほとんどの生徒が映画を取り上げていました。
「アイ・ロボット」「アンドリュー」「A.I.」「ロボッツ」「スターウォーズ」などです。
映画のストーリーを紹介し、そこでロボットがどのように表現されているか、それについてどう感じたか、
そしてロボットと共存する社会についてどう展望するか、などを中心に発表をしてもらいました。
どうしてもストーリーを追ってしまって、映画を製作した側の意図まで読み取るのはむずかしいようでした。
また、たまたまインターンシップで海洋研究開発機構に行った生徒が、無人の海洋探査機「うらしま」について、報告をしてくれました。「うらしま」が海洋研究に多いに貢献していることや、今後の展望、課題は山積みであることなどを発表しました。
最後に私の方で簡単なまとめをしました。 よく言われることですが、欧米ではキリスト教の思想も背景にあって、ヒューマノイド(人間型ロボット)への恐怖心のようなものがあり、ロボットがいずれ人間に反逆するといった描かれ方をすることが多い。それに対して日本では「アトム」に代表されるように、ロボットに対しては友好的な感情を持っている。そういったこともロボット研究に影響を与えている。
また、単なる機械が思考を始めた時に、どういうことになるのかというのがよくテーマになるが、映画や小説などで描かれているのは、あくまでも人間から見た視点である。
ただ、技術開発に携わる人は、それが人間社会にどういう影響を与えるかということを常に考えてほしいと思うわけです。新しい技術は必ずしも人間にいいことばかりではないということですね。
* 生徒の感想 *
発表をきいての生徒の感想です。
- この発表を聞いて、見たことのない映画おことやロボットと人間の関係なども映画によって様々だなと思いました。
- ロボットの映画を見て、どれも私と同じようにどこかで人間に通じているなと思った。私の場合は人間の意志と体だったが、他には愛だったり、勇気だったり、いろいろなところで人間に通じていた。
- 近い将来に現実になるような気がしてきた。
- 「アイロボット」を見た人は5人いたけれど、皆いろいろな考え方をしていて、1つの映画でも様々な解釈ができるのだと思った。
- ほとんどの人が映画について発表していて、どの映画もおもしろそうだったので、一度は見てみたいと思った。
- いろいろな人の視点から見るロボットを知った。人間はロボットをだんだん人間らしくしたいけれど、それと同時にあまり人間みたいにすると犯罪を起こしたりする可能性がでてくることも恐れているということがわかった。
- ロボットに感情があることを前提とした話が多かったように思う。
* 活躍するロボット *
様々な分野で活躍しているロボットをメンバーで分担して調べ、報告をしてもらうということで、
その分担を確認し、調べる作業を開始しました。
今日のところはまずインターネットを使いましたが、
この後残った夏休みの期間、図書館なども利用して、新聞、雑誌、書籍など資料収集をしておくように指示をしました。
第14回・ライントレーサの製作実習(1)
 |
今年も夏休みの3日間、 県立磯子工業高校にお世話になりました。電気科の先生方(佐々木先生、梶本先生、栗田先生、内田先生)のご指導のもと、ライントレーサの製作です。 |
*プリント基板加工(穴あけ) * ボール盤を使って、プリント基板の穴あけ作業です。あける穴の数はおよそ100個、集中して作業をしますので、目がかなり疲れます。
|
 |
 |
*アルミ(シャーシ)加工 * アルミ板にけがき針でけがき(アルミ板に図面を書き写す)をします。 |
そして、センターポンチで位置を定めた後、ボール盤で穴をあけていきます。 |
 |
 |
これは、切断したアルミの板を折り曲げているところです。 |
*ギアボックスの組み立て * 今度は、ギアボックスの組み立てからです。昔作ったプラモデルの要領を思い出しながら・・・。 |
 |
 |
*プリント基板加工(はんだ付け) * 午後からはんだ付け作業に入ります。はんだ付けのコツを教えてもらい練習をした後、メイン基板のはんだ付けです。 |
| 場所や部品の向きを間違えないように、慎重に作業をしていきます。 | 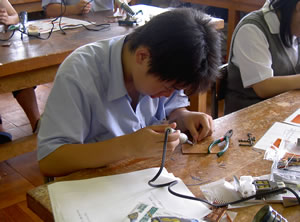 |
* 生徒の感想 *
1日目の実習を終えての生徒の感想です。
- ライントレーサを作っていて、物づくりは楽しいことだと思った。物を作っている時はすごく集中して作っていたと思う。みんなも作っている時は集中していて休みをほとんどとらずにとても熱心にやっていた。
- 基板の穴あけの時は、とてもおもしろかった。それにきれいに穴あけができた。午後の半田づけは、ちょっと得意だったから集中できたし、楽しくできました。
- モーター作りまでは、ミスもなかったけれど、はんだづけになると結構むずかしかった。向きが逆だったりとか、はずれたりとか、つけ忘れたりとか、とにかくいろいろありましたが、最後に先生が直してくれたのでなんとか終わりました。明日は組み立てです。ちゃんと、できるかなあ・・・・。
- 基板に穴をあける作業は初めてやったので、大変でした。穴を空ける場所が決まっているので、不器用な僕にはかなりきつい作業でした。はんだの作業は暖めが少し足りなかったので、富士山型ではなく、玉型のはんだがほとんどでした。
- 基板の穴あけが予想以上に難しく、大変な時間と労力を要した。ギアボックス組み立てもむずかしかった。はんだづけはとても楽しかった。
- はんだづけがうまくできなかった。
- モーターの組み立てとか、はんだづけとか細かい作業が多くてとても楽しかった。基板の穴あけは0.8mmとか小さなものだったので、大変だった。
- アルミがすごく簡単に切れたのでとてもすごかった。プリント基板の穴あけでドリルが大きくなると穴の後ろが欠けやすいからあせった。はんだづけのときに、コードがむけなくてとても時間をとってしまった。時間がとても速くて、楽しかったので良かった。
- 土台やギアーボックスの組み立ては簡単ですぐできた。基板のはんだづけは難しかったけれど、やりがいがあってとても楽しかった。
- 穴あけは、中学でやっていなかったので、いい経験になったし楽しかった。基盤に穴をあける作業は大変だなと思った。
- 基盤のジャンパー線をつけるのに時間がかかってしまった。
- はんだを上手くつけるコツがわかったので、早くはんだをつけられました。
- はんだづけは簡単だったが、ジャンパー線をはがすのにかなり手こずった。そのおかげで作業が遅れてしましった。ギアーボックスはミニ四駆みたいに簡単に作れた。
第15回・ライントレーサの製作実習(2)
*2日目の授業 * 2日目、県立横浜清陵総合高校の石川校長から、「この3日間、皆さんは素晴らしい経験ができていると感じています。磯子工業高校の先生方に深く感謝するとともに、この授業で学んだことを次へとつなげていってほしいと思います。」を挨拶がありました。 |
 |
 |
*シャーシ等の組み立て * メイン基板とセンサー基板をケーブルでつないでいきます。基板と電池ボックス、モーターなどをつなぎます。そして、シャーシ(本体)に、キアボックス、基板などを取り付けていきます。最後に、センサー、ICを取り付け、電池をつなぎ完成です。 *動作確認 * 組み立てが終わると、1人1人動作確認をしてもらいます。すんなりいく場合の方が少なく、うまくいかないとその原因を追及し、修正をしなければなりません。
|
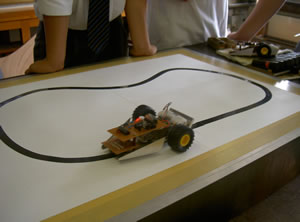
*テスト走行 * 本体が完成しました。テスト用のプログラムで、コースを走らせてみます。きちんとトレースできたかな? |
 |
 |
*プログラミング * 午後からは、プログラミングです。ICの各ポート番号と接続回路についての説明を受けています。入力と出力のポート番号、そして2進数を理解しなければなりません。 |
*コンパイル&転送 * 最初は、ledを点灯させるという簡単なものからトライします。メモ帳を使ってコードを入力しています。(C言語)最初は3つあるledを順次点滅させる、次はモーターを動かす、そしてセンサーの白黒判定に応じてモーターを動かす・・・とどんどん課題がむずかしくなっていきます。 |
 |
 |
うまくコンパイルできたら、それをマシンに転送します。そして、白黒判定の実験です。 |
* 生徒の感想 *
2日目の実習を終えての生徒の感想です。
- 最初、プログラミングはいやだった。けれど先生の教え方がうまくて、プログラミングがわかり、段々楽しくなってきた。3つのランプを順番に点滅させるところは、自分で考えてプログラムをするところでした。そこでは自分で何とかできて、できたときは本当にうれしかった。磯子工業高校に来て、プログラミングも少しはできるようになり、良かったと思いました。
- ライントレーサは正常に動いて良かった。プログラミングのとき、やはり苦手だったので少し時間がかかるところがあった。
- 組み立てはうまくいったがプログラミングが、思うようにいかない。明日はもっと上手くやりたい。
- パソコンが家にないので、入力が遅く、みんなと差が出てしまった。友達に助けてもらいなんとか授業が終わる頃には追いつくことができた。自分のマシーンが動かなかった原因は青線が中で切れていたことだった。
- C言語プログラミングが極めて難しかった。次回が思いやられる。
- プログラミングの意味を理解できなかった。
- 本体はちゃんと走れるまで完成することができて良かった。プログラムはいままでのロボラボやAIBOの開発と違って、全部自分で作らなければならないので、難しかった。
- プログラミングは意味のわからないことが書いてあるのではなくて、ちゃんとルールがあるのにびっくりした。英語ができないと、プログラミングは厳しいなあと思った。
- 半田づけが終わって、先生に見せたらセンサーが反応していたのに、タイヤが動かなかった。先生ははんだづけをやり直しても動かなくて、モーターをギアボックスからはずしてやってみたら動いた。実ははんだの部分に問題があったわけではなく、ギアボックスのどこかが悪かっただけだった。
- 物作りは好きなので、すばやくできてよかった、基盤との配線をつなぐとき、配線がからまって難しかった。プログラミングは、基本の動作をやってみてちゃんと作動してよかった。
- プログラムは、最後のほうが詰め込みだった。もうちょっと理解してやりたかった。
- 最後のプログラムがなかなかできませんでした。
- はんだ付け作業の途中で火傷をしてしまったが、特に問題もなく作業を続けることができた。組み立て途中で何度か配線が切れることがあったけれど、何とか完成した。
第16回・ライントレーサの製作実習(3)
 |
*電気工事実習を見学 * 電気工事の競技会を控え、熱心に練習に取り組んでいる様子を見学させていただきました。 *電気実験 * また、電気実習室では、高電圧の電気実験を見せていただきました。絶縁体であるガラス板に数万ボルトの電圧をかけたり、10万ボルトの電気を一気に放電して雷を起こしたりと、迫力のある実験でした。
|
*プログラミング * 3日目は、朝からコンピュータ教室にて、ライントレースのプログラム作りです。どうしたら、きれいにしかも速く走れるかを考えます。 |
 |
|
コンパイルして転送、エラーがでると修正、うまくいけばマシンで実験、その繰り返しです。 |
いろいろと試行錯誤しているうちに、マシンの不具合もでてきます。はんだづけを確認したり、タイヤをつけ直したり、ギアボックスを組み立て直したり・・・、そして実験です。カーブはうまくいくんだけどなあ・・・。 |
 |
 |
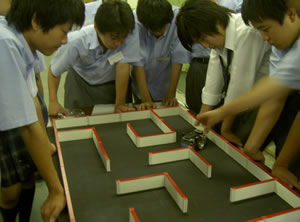
大きなコースで試しています。カーブはきれいにトレースしていきますが、90度の角で苦労しているようです。センサの位置をずらしたり、プログラムを変更したりして調整をしていきます。 そして、いよいよタイムトライアル! 1台ずつコースを走ります。皆が見守る中、コースアウトしてしまうとため息が・・・。そして完走すると拍手が起こります。 |
県立磯子工業高校の山中教頭から、「今回学んだことを、次のステップに生かしてください。また、両校の人と人とのつながりも是非大切にしてほしいと思います。」ということばをいただきました。 3日間の講習、磯子工業高校電気科の先生方には本当にお世話になりました。どうもありがとうございました。 |
|


* 生徒の感想 *
3日目の実習を終えての生徒の感想です。
- ライントレースをどういうふうにしたら早く走らせることができるのか考えたりしました。先生がセンサーを2つにしたら早く走れるかもしれないと言っていたので、2つにしてみました。普通のカーブは結構早く走れたけれど、直角の場所だけがうまくいきませんでした。だから結局3つのセンサーに戻してスピードの調整をしました。タイムトライヤルでは、1回めはとてもうまく走れて完走することが出来ました。2回め、3回めは直角がうまくいかなくて完走することができませんでした。でも、1回めの記録が1分26秒で優勝することができて良かったです。
磯子工業高校に行き、ライントレースを作ったことで
- やはり苦手なプログラミングは時間がかかった。最後の方で、ライントレーサに故障があり、サーキットでのタイムトライヤルは1回しか計れなかったのが残念だった。
- 自分で考えてライントレースができるようにするために何回も組み立て直したが、結局1回しかうまくいかなかったのは悲しい。
- 90度の角がうまくいかなかったのが、とても残念でした。練習ではうまくいった時もあったので、自分のマシーンはかなり気分で走っているのかな? 直線はスムーズに行った方だと思う。90度のカーブの解決策としては、やはりバックを入れる必要があると思う。なぜなら完走したほとんどの人がバックを使っているから、そのかわりタイムは遅くなる。
- 後半になってエラー原因を追求できるようになってきた。しかし、今度はロボットの物理的問題が発生して良い状態でのタイムアタックに挑戦できなかったのは、とても残念だった。
- 自分のプログラミングでコースを一周したので、うれしかった。
- プログラム作りは、1つ1つ考えて文を作らないといけないので、大変だったし、難しかった。レースでは一度も一周することができなかったのは残念だったけれど、直角以外はきれいに走れたので良かった。
- レースをしたけれど、うまくいかなかった。むちゃくちゃ速いマシンがあってびっくりした。また、雷が機械でできるのにびっくりした。
- 午前のライントレーサのプログラムの仕組みは難しそうに見えるけれど、先生たちが教えてくれるのが上手だからわかりやすかった。しかも楽しくて夢中になってやっていたら午前が終わってしまった。午後2時にやっと自分が作ったマシンにあったプログラムができた。テスト・ランでちゃんと走ってくれたのに、本番になったらなぜか90°のところでコースアウトしてしまった。1回目、2回めはほとんど同じところでコースアウト、何かおかしいと思って何もないところで走らせたら左タイヤの反応が鈍いことに気づいてとりあえずギアにグリスをぬった。すると、3回目はゴールすることができた、しかもタイムもよく、2位になった。
- 「コンピュータ技術」をとっていたので、簡単にできた。自分の作ったプログラムがちゃんと作動してよかった。最後にレースをしたが、コースアウトして記録が残せなかったのが残念でした。
- 最後、ゴットハンドを使って完走できたが、はっきりいってまだ満足できていない。時間的というよりも、内容を理解できていない。
- プログラムだけではなく、スピードも大切だということがわかりました。
- タイム計測は、2回め以降プログラミングを過ってしまい、結局一回も完走できなかった。
全体を通しての感想です。
- 磯子工業高校に行き、ライントレースを作ったことでいろいろと勉強になった。そして、いやだったプログラミングも前より好きになれてとても良かった。最終日にやったライントレースのタイムトライヤルではみんな一生懸命に完走させよう、どうしたら早く走れるのか考えていました。みんな他の人を応援していたりしていてとても楽しくできたと思います。この3日間でぼくはライントレースを通じていろいろと勉強にもなったし、楽しいことやうれしかったこともあり磯子工業高校に行って良かったと思いました。
- この3日間、楽しくできてとても良かった。でも、パソコンが苦手なので、途中で行き詰まってしまったりもした。故障があって、1回しか走れなかったのが残念です。
- はじめから考え直してみると、はんだづけは中学校以来だし、プラモ・ミニ四駆も中学で最後だった。パソコンは最近かなり使っているが、プログラミングはしたことがなかった。最近やっていないことがたくさんできたのでうれしい。
- ロボットには強い興味があり、この授業をとった。しかし本当にロボットを作ろうとするとすごく難しいことが身にしみてわかった。基板のはんだづけは得意であったが、課題が多く残された。組み立てにも問題は残った。100%成功を使用とは思わなかったが、好きなだけにとても悔しい。しかしそれよりもC言語のプログラミングは、エラーが発生してもパソコン相手だとこっちもやりたいように出来ないことが苦しくて、ほんの一瞬ロボット製作が嫌いになったが、自力で解決に導いた後は、思う通りにプログラミングしてロボットがその通りに走る、そして問題が見つかれば追求してまたプログラミングを組む、やはりロボットを作るのは楽しいと思った。今回は3日間で製作ということで、その大変さを知ることとなった。しかし、是非機会があればもっと時間を費やして、自分の納得するロボットを作りたいと思う。
- ロボット作りは、初めての体験で、はんだづけやプログラミングは大変だったが、とても貴重な体験ができたと思う。
- 工業高校は今まで行ったことがなかったけれど、設備とかがすごくてびっくりした。はんだづけとかで、本体を作るのはとても楽しかったし、同じくらい雷の実験はおもしろかった。プログラムの方は、1つ記号がないだけで動かなかったり、英語で作らないといけなかったりして本当に難しかった。
- ライントレーサを作るために使った機材があまり見たこともないものがあってすごく新鮮だった。プログラミングはすごく頭を使ってとても大変だったけれど、みんなよりすごいのを作ろうとしたのでとても楽しかった。雷が目の前で見られたり、電気を目で見られたので、磯子工業まで行ってとても良かった。また、行きたいと思う。
- 全体を通して思ったことは、あのライントレーサだけであれだけのプログラムを書くのだから、生活の中にある機械などはすごく多くのプログラムがあると思った。例えばカーナビなどの機械はすごいだろうなあと思った。いろいろと学べて良かったし、楽しかった。もっと深く学びたいと思った。
- プログラムをやる時間があるのは、良かった。全体的にはそこそこできたし、楽しかったのは良かった。次は(?)もっと上のレベルのロボットを作ってみたい。
- プログラム作成を本格的にやるというのは、なかなかできないので、いい体験ができたと思います。
- 3日間やった中で、プログラミングが一番難しかったです。学校でやるのと違い、完全に手動でのプログラミングだったので、途中からわけがわからなくなることもありました。しかし、学校の中を見学できたことはとても良かったです。人工的に雷を発生させる装置にはかなり驚きました。
第17回・県立産業技術短期大学を見学
*県立産業技術短期大学を見学 *
県立産業技術短期大学を見学させていただきました。
|
*県立産業技術短期大学の学科紹介 * 5科あるうちのロボットに関連の深い、生産技術科、制御技術科、電子技術科の紹介をしていただきました。どの学科に入学したとしても、学ぶ内容の重さ加減が多少違うにしても、ロボットへのアプローチはできるということでした。また、就職率100%という進路先にはどんなものがあるかということも説明していただきました。 |
|
 |
*ライントレーサの話* 前日まで磯子工業高校でライントレースの製作実習をしてきたということで、ライントレーサの電子回路について、また加工作業においては、いかに精度の高い加工をするかが重要であるというようなお話をいただきました。 |
|
*旋盤* 学生さんが、旋盤作業をするところを見せていただきました。大きな機械にびっくりです。 加工実習室は、体育館のように広い部屋で、こういった工作機械がたくさんおいてありました。 |
 |
 |
*フライス盤* 金属の表面を削ったり、溝を加工したり、穴をあけたりするための機械です。これも学生さんが操作するところを見せていただきました。
|
|
*操作フライス盤(NCフライス盤)* コンピュータ制御のフライス盤、設計図の通りに機械が自動で金属を加工していきます。高そうな機械だなあ・・・。 |
|
 |
*卒業研究作品の見学* 学生さんたちが作った卒業研究作品を見せていただきました。 この部屋には、電子技術科の卒業研究作品がおいてあります。
|
*ロボット* 内山先生の研究室で取り組んでいるロボットを見せていただきました。相撲ロボットの素早い動きにはびっくり。この2足歩行ロボットは、肩がしなやかに動き、華麗なダンスを見せてくれました。 |
 |
|
*マイクロマウス* マイクロマウスロボットも見せていただきました。迷路の中を最短経路を探して進みます。1回めは、迷路全体を探索しますが、何回かすると、最短であっという間にゴールまで行きます。 *見学を通して* この見学を通して、自分たちが今学んでいるロボットの先にどんな世界が広がっているのかが、わかったのではないかと思います。内山先生、岩崎先生、どうもありがとうございました。 |


* 生徒の感想 *
見学を終えて、生徒の感想です。
- 大学って楽しそうと思いました。本当に自由があり、みんなが好きなことができるようなところに見えました。そこの学生もがんばっているからこそ自由があるみたいだったので、やはりがんばらないと大変だけれど、がんばっただけ自由があり、好きなことができてそれだけ学生生活も楽しめるということがなんとなくわかった気がします。
- 相撲ロボットの動きが早くてパワーもあり、とてもすごいなと思った。相撲ロボットの速さは、一般の人が走るのと同じぐらいと聞いて本当にすごいと思った。一度、相撲ロボットを分解するか、作ってみたいと思った。夏期の講座の最終日で少し疲れていたけれど、しっかりと見学できたと思う。今日、見学したことを、これから役に立てていきたいと思った。
- 短期大学はいろいろなことを少しずつ学ぶのかと思っていたら、違った。最も深い内容のことを学ぶということがわかった。
- いろいろな機械やロボットを見て、高校生ではできないことがたくさんあった。興味を持てることがあって、楽しかった。
- 台風が来て遅刻してしまったが、いい物を見ることができて、大変興味がわいた。自分自身は、短大に行くのは初めてだったが、内容についてとてもよくわかった。私が好きだったところは、なんといってもロボワンに出たロボットがあったところだ。TVを見ていてもとても興奮したので、すぐ近くにあるだけでもうれしかった。私は将来の夢を見直せたような気がしました。これからも夢に向かっていきたいと思います。
- 人型ロボットが動いていたところを生で見られたことがうれしかったです。
- 短大なのに、中は工場みたいで驚いた。相撲ロボットや二足ロボットなど近くで見ると迫力があってすごかったし、電光掲示板や自転車発電もすごかった。
- 昨日まで行っていた磯子工業高校でのライントレースシステムロボットについて更に知識を深めることができた。ロボットについてと、それを学ぶにあたっての行程と、短大としての特徴を生かした活動を知ることができて良かった。今まで短大は大学よりもつまらなくて・・・という印象があったが、あまりに充実していたことに驚いた。各学科にも分かれているが、話の中で完全に別々というわけでもないことが、すごいと思う。作業工程に必要な機器が充実していて驚いた。
- 予算や技術が、大学はすごいなあと思った。2年半待つのは大変なので、うちの高校でもいろいろとやってほしい。
第18回・活躍するロボット
* 活躍するロボット *
夏休みの続きということで、様々な分野で活躍しているロボットを分担して調べました。
最終発表のために、プレゼンテーションソフトの使い方を簡単に説明した後、
各自資料収集と、プレゼン用のスライドの作成に取り組みました。
分担した分野は以下の通りです。
- 宇宙ロボット
- 医療ロボット
- 災害救助ロボット
- 地雷除去ロボット
- マイクロロボット
- エンターテイメントロボット
- ペットロボット
- コミュニケーションロボット
- 介護ロボット
- 警備ロボット
- ホームロボット
- 人型ロボット(ヒューマノイド)
- 競技用ロボット(ロボコン)
- 操縦型ロボット
- 軍事ロボット
 戻る
戻る