* はじめに *
「ロボット入門」という科目を今年度は、短期集中講座(1単位認定)という形で実現することができました。自分の作ったロボットが動く感動を味わってもらいたい、プログラミングすることで実体としてのロボットを制御することを体験してほしいということでこの科目を計画してきました。また、最近のロボット研究の成果は本当に素晴らしいものがあります。ロボットと共に生きる、あるべき未来像を描いてほしいということもあります。
この科目の実現は、県立磯子工業高校電気科の多大なる協力があってのものです。ライントレーサの製作実習を工業高校で指導していただくことで、普通科の限界を超えた、より内容の深い学習ができると感謝をしております。
第1回・科目オリエンテーション/ロボットと人間
* 科目オリエンテーション *
初日、この科目の概要説明(内容、スケジュール、評価、諸注意など)をしました。
* ロボットと人間 *
授業に入り、まず最初に ロボフェスタ神奈川2001公式記録のDVDをみました。ちょうど2年前に横浜をはじめ、横須賀、相模原、川崎の4会場で開催されたものです。2年前の映像ではありますが、様々な分野で活躍しているロボットの様子が映像でよくわかります。後で生徒に感想を聞いてみると、
- ロボットコンテストがおもしろそうだった。
- ロボットがいろいろなところで使われているのは知っていたが、こうしてもっと多くのロボットの多様性をみると改めてすごいと思った、特に人間型ロボット以外にも、虫型や動物型のものもいたのに驚き、とても興味を引かれた。
- 技術の高さに驚いた、医療関係のロボットで、たばこ1本分よりもさらに小さいロボットアームを見て感心した。
- 人型のロボットや、習字をするロボットなどが印象に残った。
- 医療ロボットにとても興味を持った。手術などは、ロボットの方が細かい作業ができるのかなと思いました。
- ロボットにいろいろな種類のものがあることを知った。二足歩行のロボットが人が自然に歩いている感じになっていた、ここまで人に近づいているとは思わなかった。
- 二足歩行をするロボットや多彩な動きをするロボットは見ていてとても楽しかったです。こういう技術がもっと進化をして、アニメやSFのような近未来的な国になるといいなあと思います。日本が最先端だということを聞くととってもうれしいです。
- ロボットがあるおかげで人間は楽になったなあと思った。
ロボット開発の歴史
- チェコ語の「robota(ロボータ)」を元に、「人間の代わりに働く人造人間」を「ロボット」と名付けられたことがことばの始まりであること。
- 鉄腕アトムやどらえもんなどSF小説やアニメで活躍するヒーローたちが、ロボットのイメージを先行していったこと。
- 映画の世界では「STAR WARS」にでてくるC-3PO、R2-D2、「2001年宇宙の旅」のHAL9000の話など。
- 日本では鉄腕アトムやどらえもんなどのように、ロボットは好ましい友人として受け入れられているが、欧米ではロボットが人間に反逆をして・・・というスーリーもあり、ロボットに対する受け止め方に違いがあること。
- 日本におけるロボットのはじまりは「江戸からくり人形」であること。
- 1970年代には、工場における「産業ロボット」として、広く普及したこと。
活躍するロボット
様々な分野で活躍するロボットを映像なども交えてみていきました。
- 消防・防災ロボット
災害救助に活躍するロボットとしては、東京消防庁 消防ロボットにある消火ロボットや救出ロボットを紹介しました。 その他にも震災などで瓦礫の中にもぐって探査するロボット、地雷を検出、除去するロボットなどの活躍の話をしました。
- 宇宙ロボット
宇宙情報センターにある 火星探査ロボット「ソジャーナー」の写真を提示して、宇宙で活躍するロボットの話をしました。
- 警備ロボット
様々なセンサーを積んでパトロールし、火災などの異常や不審な人物を発見したら通報してくれるという警備ロボットを紹介しました。
- 清掃ロボット
家庭の中で、私達の生活を支援してくれるロボットの例ということで、松下電器産業の「じそうじ丸」を紹介しました。
- 介護ロボット
三菱重工製「ワカマル」を例に、高齢者やひとり暮らしの方のよきパートナーとしてのロボットの役割に触れました。 「ロボットと話をしてもつまらないよ。」という意見がある一方で、「人間は孤独に耐えられないから 、これはとてもいい」という意見も聞こえてきました。
- ペットロボット
ペットロボットといえば、SONYのAIBOですね。AIBOの開発の課程が最近NHKの プロジェクトXでとりあげられましたが、ロボットが成長していく、また育て方によって性格が変わってしまうというところに我々の想像を越えた発想があります。
ロボットが動くしくみ
ホンダのアシモを例に、ロボットが動くしくみ(情報の入力 → 処理 → 出力)を説明しました。
更に、ホンダが14年をかけて開発した二足歩行ロボットの開発の過程なども含めて、
デジタル進化論のサイトを活用させていただきました。
アシモについての情報や、動画などは、
ASIMO SPECIAL SITE
にあるものを使わせていただきました。
自律型ロボットの将来
自律型ロボットで抑えておく項目は、先ほどの(情報の入力 → 処理 → 出力)に対応して、
(1)情報を得るためのセンサー (2)情報処理を行うコンピューターとプログラム (3)ボディを動かすための仕組み という確認をしました。
アシモについては、かなり早い
スピードで歩くことができるシルバーアシモ→
ZD NET NEWS 倍速“銀ASIMO”、
WPC ARENA ROBODEX2002にある「SDR-4X」などの映像をみました。
AIBOを従えて踊り、転倒しても自ら起きあがることができるロボットということで、日々進化しているロボットに生徒たちも驚いている様子でした。
更には複数のロボットが協調しあって動くということで、
ロボカップ日本委員会のRoboCupサッカーの話などもしました。
* 生徒の感想 *
- 二足歩行のロボットを作る大変さ、難しさなどを知った。そしてその技術がすごい速さで進んでいることを知った。
- ロボットを動かすのにこんなにいろいろな仕組みがあることを知って驚いた。
- シルバーASIMOや、その他の二足歩行のロボットを見て驚いた。いつか、人間を同じような動きもできるようになると思った。
- ロボットはすごく奥が深くて、それを作っている人はスゴイ!っと思いました。 いろいろな要素がたくさん入っていて、私には絶対無理だと思いました。
- 心はプログラミングできないけれど、近いうちに人間っぽいロボットができそうで楽しみです。
- けっこー驚いた。ロボットもここまで来たか!!みたいな感じで。それにロボットがこれから改善していかなくてはいけない問題点もいろいろとわかった。
- ロボットが様々なところでいろいろな分野に分かれて仕事をしているのを見て、さらにこれからのロボットに対しての期待感が高まった。ロボットの進化は人間の進化よりもめざましいものがあると思った。
- 危険なことをやってくれるロボット、ペットのようなロボット、いろいろなロボットがあるなと思いました。人間と共同に生活できるロボットができたらいいです。しかし、TVやアニメのようにならなくていいです。あくまでもロボットは人間のサポート的な存在と思う。

第2回・ロボラボによる実習(1)
*ロボラボの組み立てと基本プログラミング*
| 今日は1日かけてロボラボによるロボット実習を行いました。 |
PILOTレベル1〜3のプログラミングを作成しながら、動作確認をしていきました。 |
|


第3回・ロボラボによる実習(2)
*ロボラボでプログラミング*
| 午後はInventorレベルのプログラミングをしました。 |
プログラミングをしたものをロボットに転送し、動作確認をします。動き方によっては、ロボットの構造を修正する必要もでてきます。 |
|
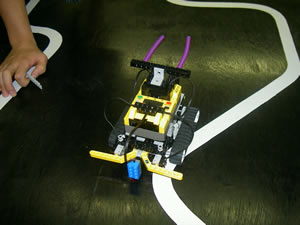
| ライトセンサーによる分岐命令「黒なら前進、白なら止まれ」をマスターした後は、いよいよ最後の課題ライントレースです。ライトセンサーで白黒の判定をしながらラインに沿ってロボットが進むようなプログラムを作ります。ロボットの構造とプログラムがうまくかみあって初めてうまくいきます。 |
生徒たちは、プログラムよりも、ロボットの構造に苦戦しているようでした。それでもうまく動き出すと、用意したコースの上を見事にトレースしていきます。白地に黒のコースと、黒地に白のコースと両方用意しましたが、どちらでもOKです。 |
|
| 3つのグループがそれぞれ作ったロボットです。思った以上にロボットを動かすのはむずかしかったかな? |




* 生徒の感想 *
- ロボット作りがむずかしかった。プログラムはよくわかったけれど、どうしてもキャタピラにするとうまくいかなくて、そこが悩んだ。時間があれば作り直そうと思う。
- ロボラボ作りは簡単そうで難しかった。でもちゃんとしたやつができてよかった。
- 最後の演習9にみんな苦戦していた。うちのチームも相棒が頭をかかえていた。
- やってみると結構楽しかった。簡単な操作でロボラボが動いてくれたのでうれしかった。よい体験ができたと思う。
- うまく走ったときはちょっと感動だった。細かい作業は面倒でしたけれど、楽しかったです。
- 楽しかった。ロボットはとても複雑で、考えて作った人はとてもすごいなと思った。
- レゴブロックがうまく組み立てられなかった。
- LEGOブロックということで甘くみていたのかもしれない。奥が深いなと思った。
 戻る
戻る
 次へ
次へ